When the synchronous motor is loaded, the rotor poles fall back by a certain angle behind the rotating stator poles. This enables the motor to produce the necessary torque to cope up with the load. For synchronous motor operating with fixed excitation, the value of this torque angle is solely decided by the load on the motor.
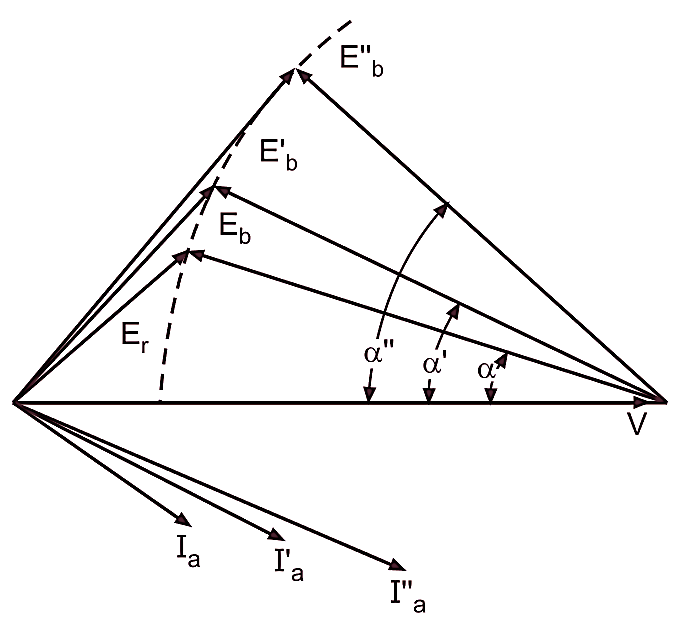
Fig. 1: Phasor diagram illustrating hunting of synchronous motor
Now, to understand the phenomenon of hunting of a synchronous motor, consider a synchronous motor operating under steady load conditions. Fig. 1 shows the phasor diagram for such a motor assuming it to be under-excited. The load on the motor is such that the torque angle is α. If an additional load is suddenly applied on this motor, the developed torque being less than that required by the load, the motor will start slowing down. While doing so, due to inertia of the rotor and its connected load, the motor will not cease deceleration at exactly the correct torque angle, say α’, corresponding to the increased load. But it will pass beyond this point (or position of equilibrium) and thereby develop more than the required torque. This will not only check the initial reduction of speed but will increase it slightly above synchronous speed. In this manner, there will be a periodic swinging of the rotor first to one side, then to other, of the new position of equilibrium. This oscillatory motion is subsequently superposed upon the uniform synchronous speed of operation. A similar situation will occur when the load on the motor is suddenly reduced. The periodic change in speed, thus produced, of the rotor under such conditions is called hunting.
Since the changes in the torque angle α are accompanied by changes in the armature current, as is clear from Fig. 1, this entire phenomenon of hunting can be observed by the slow periodic swinging of the pointer of the ammeter connected in the supply circuit. If the variations in load are periodic and synchronize with the natural period of oscillation of the rotor, mechanical resonance will be set up and the amplitude of the swing of the rotor poles relative to the rotating stator poles will become so great that the motor will fall out of step. The mechanical stresses are likely to be severe and the armature current greatly increases when the motor leaves synchronism. Hunting is thus an objectionable characteristic of a synchronous motor.
Prevention of Hunting in Synchronous Motor
To prevent hunting, synchronous motors are always provided with damper windings, or amortisseur windings. They consist of low resistance copper bars embedded in slots in the pole faces, the projected ends of the bars being connected to end rings in the manner similar to that of squirrel-cage windings commonly used in induction motors. Phase-wound damper windings with adjustable resistance are also used to obtain high starting torque with moderate starting currents and high pull in torques.
So long as the rotor rotates at synchronous speed, there is no relative motion between the rotating field of the armature and the conductors of the damper winding, and the damper winding has no effect on the operation of the motor. But as soon as the speed of the rotor departs from the synchronous speed during hunting, there is relative motion between the rotating armature field and the damper winding and currents are induced in the damper winding conductors. In accordance with Lenz’s law, these currents are in such a direction that they tend to oppose and damp the tendency of the rotor to oscillate while rotating and thereby pull the rotor back into synchronism. Thus, the hunting is prevented.