The polar configuration is also referred to as the spherical configuration as this combination allows the robot to operate in a spherical work volume. The polar arm and body configuration is shown in Fig. 1. In the polar configuration, the robot arm has following movements:
- Linear movement that allows the arm to extend and retract because of one linear joint.
- Rotary movement that occurs around an axis (vertical) perpendicular to the base because of one twisting joint.
- Vertical lift of the arm about the pivot point because of one rotational joint.
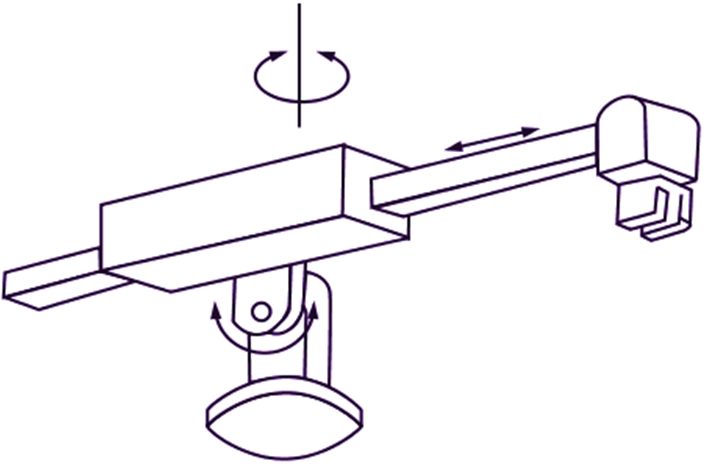
Fig. 1: Polar Arm and Body Configuration
Advantages of Polar Robot Configuration
The polar configuration has following advantages:
- It allows long reach capability in the horizontal position.
- It provides good load lifting capabilities.
- It is suitable for applications where a small amount of vertical movement is adequate, such as loading and unloading of components.
Limitations of Polar Robot Configuration
The polar configuration has following limitations:
- It has a low vertical reach.
- It has a reduced mechanical rigidity.
Applications of Polar Configuration
The polar configuration finds applications in machine tool loading, movement of material, stacking of components, heat treatment operations forging etc.