After reading this topic Unit step input time response of a first order control system, you will understand theory, error expressions and derivation.
A block diagram of first order closed – loop control system with unity negative feedback is shown below
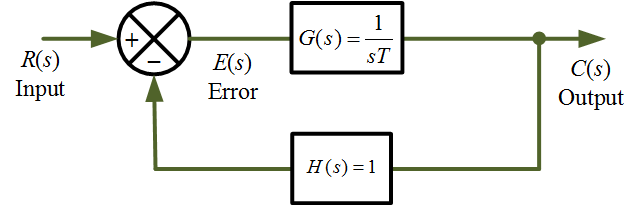
Figure 1 First order control system block diagram. www.electricalworkbook.com
The general output C(s) for the first order control system as
\[C(s) = R(s)\frac{1}{{1 + sT}}….(1)\]
The input R(s) to the system is unit step function, so in the s – domain
\[R(s) = \frac{1}{s}….(2)\]
and in time(t) domain,
\[r(t) = 1\]
Hence, Equation1 and Equation 2 gives
\[C(s) = \frac{1}{s}.\frac{1}{{1 + sT}}….(3)\]
Applying partial fraction on Equation 3 gives
\[C(s) = \frac{1}{s} – \frac{T}{{1 + sT}}….(4)\]
Equation 4 can written as
\[C(s) = \frac{1}{s} – \frac{1}{{s + (1/T)}}….(5)\]
Applying inverse laplace transform on both sides of Equation 5
\[{\mathscr{L}^{ – 1}}C(s) = {\mathscr{L}^{ – 1}}\left[ {\frac{1}{s} – \frac{1}{{s + (1/T)}}} \right]\]
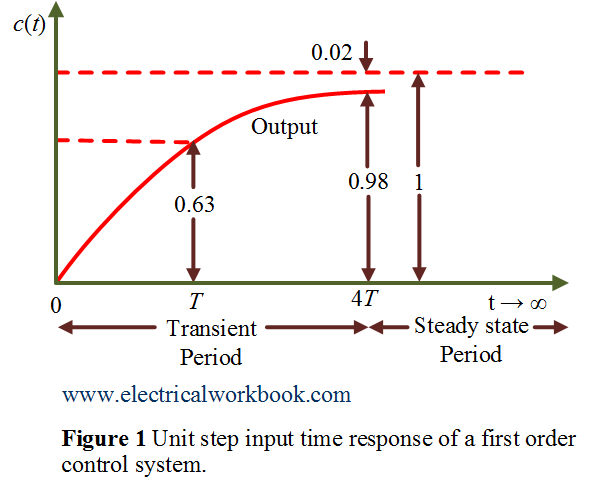
\[c(t) = 1 – {e^{ – t/T}}….(6)\]
The time response c(t) of Equation 6 is shown below in Figure 1.
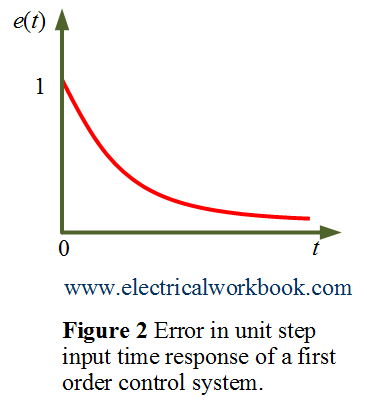
Error expression
The error in time domain written as
\[e(t) = r(t) – c(t)\]
\[ = 1 – (1 – {e^{ – t/T}})\]
\[ = {e^{ – t/T}}….(7)\]
The steady state error is given as,
\[{e_{ss}} = \mathop {\lim }\limits_{t \to \infty } {e^{ – t/T}} = 0\]
The error expression of Equation 7 is shown below in Figure 2.