SCARA is an acronym for Selective Compliance Assembly Robot arm. One Scara configuration is shown in Fig. 1. In Scara, the robot arm has following movements:
- Linear movement that allows the arm to extend and retract because of one orthogonal joint.
- Rotary movement at the top of the column about the shoulder joint (along vertical axis) because of one revolving joint.
- Rotary movement at the output arm about the elbow joint (along vertical axis) because of one rotational joint.
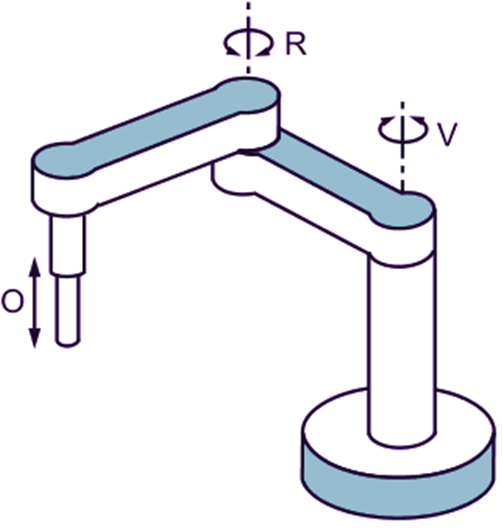
Fig. 1: SCARA configuration