The jointed arm robot configuration resembles to a human arm. The jointed arm and body configuration is shown in Fig. 1. In this configuration, the robot arm has following movements:
- Rotary movement (vertical column that swivels about the base) that occurs around an axis (horizontal) parallel to the base because of one twisting joint.
- Rotary movement at the top of the column about the shoulder joint (along horizontal axis) because of one rotational joint.
- Rotary movement at the output arm about the elbow joint (along horizontal axis) because of one rotational joint. It gets three rotary joints and three wrist axes, which form into six degrees of freedom. As a result, it has the capability ty to be controlled at any adjustments in the work space.
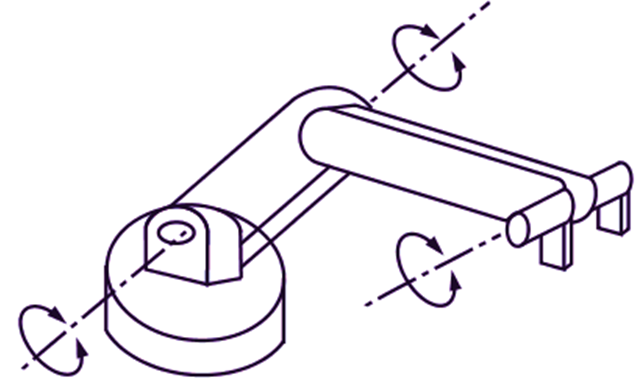
Fig. 1: Jointed Arm Body Configuration
Advantages of Jointed Arm Robot Configuration
The jointed arm configuration has following advantages:
- It has a huge work volume.
- It has higher flexibility and so is quick in operation.
- Two rotational joints allows for higher reach from the base.
- It provides reaching the congested small openings without restrictions.
Limitations of Jointed Arm Robot Configuration
The jointed arm configuration has following limitations:
- It has a difficult operating procedure.
- It has plenty of components.
Applications of Jointed Arm Robot Configuration
- The jointed arm configuration finds applications in spray painting, spot welding, arc welding etc.
- This configuration robot is also called an articulated robot.