In this topic, you study the Static and Dynamic Systems theory, definition & solved examples.
Let $x(t)$ and $y(t)$ be the input and output signals, respectively, of a system shown in Figure 1. Then the transformation of $x(t)$ into $y(t)$ is represented by the mathematical notation
$y(t) = {\mathbf{T}}x(t)$
where $\mathbf{T}$ is the operator which defined rule by which $x(t)$ is transformed into $y(t)$.
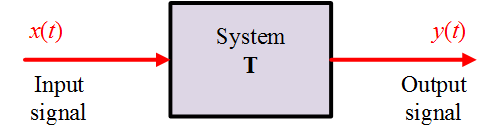
Figure 1: System with a single input and output signal.
Static System
A system is called static if output of system is dependent on present value of input. It is also known as memory less system. Example of static systems are
\[y(t) = x(t)\]
\[y(t) = tx(t) + 2x(t)\]
Dynamic System
A system is called dynamic if output of system dependents on past or future values of input at any instant of time. It is also known as system with memory. Example of dynamic systems are
\[y(t) = x(t + 1)\]
\[y(t) = tx(t) + x(t – 1)\]
Example : Determine whether or not each of the following systems are static with input $x(t)$ and output $y(t)$.
(i) \[y(t) = x(3t)\]
(ii) \[y(t) = x(-t)\]
(iii) \[x(\cos t)\]
Solution : (i) \[y(t) = x(3t)\]
put $ t = 1$
\[ y(1) = x(3) \]
hence the system is Dynamic as output $y(1)$ depends on future input $x(3)$.
Solution : (ii) \[y(t) = 5x(t)\]
put $t$ = 1
\[ y(1) = 5x(1) \]
hence the system is static as output $y(1)$ depends on present input $x(1)$.
Solution : (iii) \[x(\cos t)\]
put $t$ = 0
\[ y(0) = x(1) \]
hence the system is dynamic as output $y(0)$ depends on future input $x(1)$.