After reading this topic Rise time $({t_r})$ in Time response of a second-order control system for subjected to a unit step input underdamped case, you will understand the theory, expression, plot, and derivation.
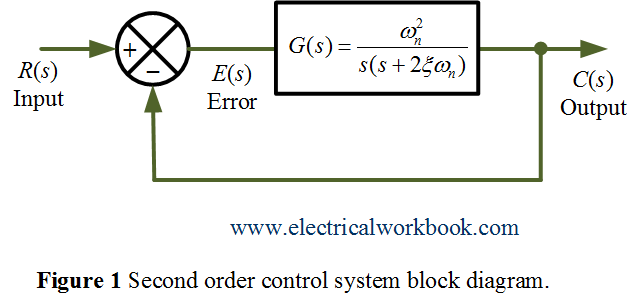
A block diagram of the second order closed-loop control system with unity negative feedback is shown below in Figure 1,
The general expression for the time response of a second order control system or underdamped case is
\[c(t) = 1 – \frac{{{e^{ – \xi {\omega _n}t}}}}{{\sqrt {1 – {\xi ^2}} }}\sin \left[ {({\omega _n}\sqrt {1 – {\xi ^2}} )t + \theta } \right]…(1)\]
Also Equation 1, is plotted in Figure 2 as shown below
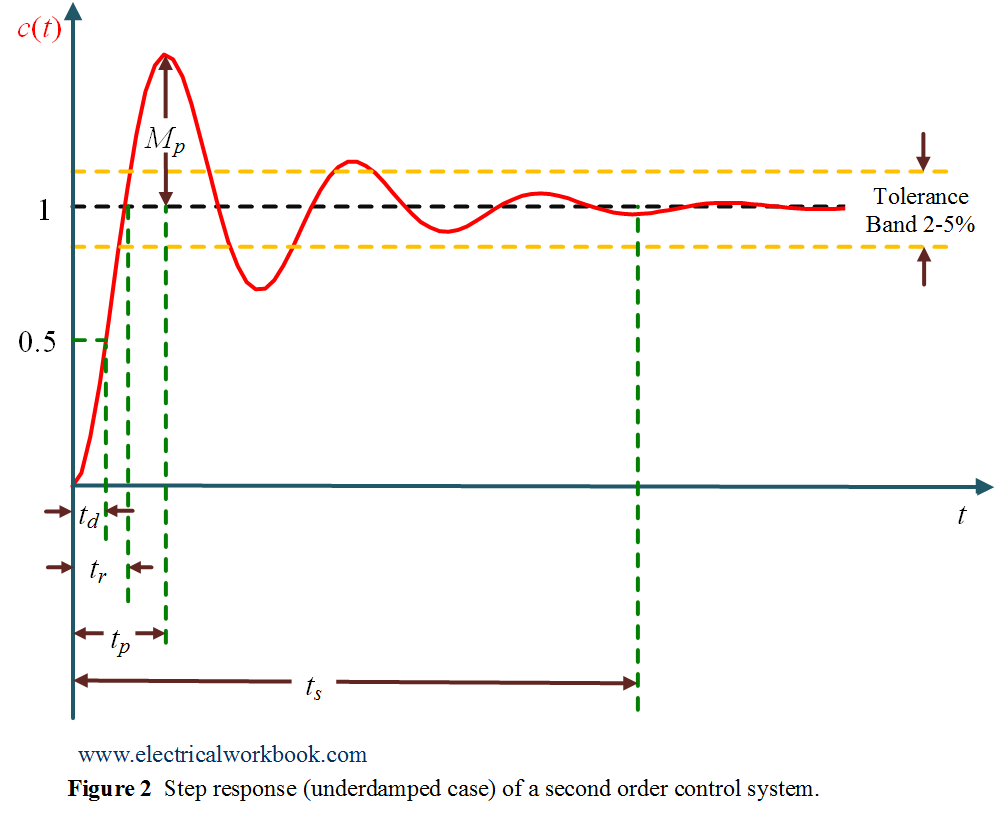
Rise time $(t_r)$
The time needed for the response c(t) to reach from 10% to 90% of the final value for over-damped system or from 0% to 100% of the final value for underdamped system, for the first time.
The rise time $({t_r})$ occurs when time response c(t) reaches to unity for the first time, so at $t = {t_r}$,
\[c({t_r}) = 1….(2)\]
Using Equation 1 and Equation 2,
\[1 = 1 – \frac{{{e^{ – \xi {\omega _n}{t_r}}}}}{{\sqrt {1 – {\xi ^2}} }}\sin \left[ {({\omega _n}\sqrt {1 – {\xi ^2}} ){t_r} + \theta } \right]\]
or simply,
\[\frac{{{e^{ – \xi {\omega _n}{t_r}}}}}{{\sqrt {1 – {\xi ^2}} }}\sin \left[ {({\omega _n}\sqrt {1 – {\xi ^2}} ){t_r} + \theta } \right] = 0….(3)\]
The term ${e^{ – \xi {\omega _n}{t_r}}}/\sqrt {1 – {\xi ^2}} $ of Equation 3 is finite and hence,
\[\sin \left[ {({\omega _n}\sqrt {1 – {\xi ^2}} ){t_r} + \theta } \right] = 0…..(4)\]
The solution of above Equation 4 is,
\[({\omega _n}\sqrt {1 – {\xi ^2}} ){t_r} + \theta = \pi ….(5)\]
Equation 5 can be written as
\[{t_r} = \frac{{\pi – \theta }}{{{\omega _n}\sqrt {1 – {\xi ^2}} }}…..(6)\]
Put ${\omega _d} = {\omega _n}\sqrt {1 – {\xi ^2}}$ in Equation 6 gives,
\[{t_r} = \frac{{\pi – \theta }}{{{\omega _d}}}\]
where,
\[\theta = {\cos ^{ – 1}}\xi \]